4.APPOLLONIUS:-( 262-190 B.C)


 Parabola connection with areas of a square and a rectangle, that
inspired Apollonius of Perga to give the parabola its current name.
The generality of Apollonius's treatment is remarkable. He defines the fundamental conic property[clarification needed] as the equivalent of the Cartesian equation applied to oblique axes—i.e., axes consisting of a diameter and the tangent at its extremity—that are obtained by cutting an oblique circular cone.[citation needed] The way the cone is cut does not matter. He shows that the oblique axes are only a particular case after demonstrating that the basic conic property can be expressed in the same form with reference to any new diameter and the tangent at its extremity.[clarification needed]
It is the form of the fundamental property (expressed in terms of the
"application of areas") that leads him to give these curves their names:
parabola, ellipse, and hyperbola.[clarification needed] Thus Books v–vii are clearly original.[citation needed]
Parabola connection with areas of a square and a rectangle, that
inspired Apollonius of Perga to give the parabola its current name.
The generality of Apollonius's treatment is remarkable. He defines the fundamental conic property[clarification needed] as the equivalent of the Cartesian equation applied to oblique axes—i.e., axes consisting of a diameter and the tangent at its extremity—that are obtained by cutting an oblique circular cone.[citation needed] The way the cone is cut does not matter. He shows that the oblique axes are only a particular case after demonstrating that the basic conic property can be expressed in the same form with reference to any new diameter and the tangent at its extremity.[clarification needed]
It is the form of the fundamental property (expressed in terms of the
"application of areas") that leads him to give these curves their names:
parabola, ellipse, and hyperbola.[clarification needed] Thus Books v–vii are clearly original.[citation needed]
In Book v, Apollonius treats normals as minimum and maximum straight lines drawn from given points to the curve (independently of tangent properties); discusses how many normals can be drawn from particular points; finds their feet[clarification needed] by construction; and gives propositions that both determine the center of curvature at any point and lead at once to the Cartesian equation of the evolute of any conic.
Apollonius in the Conics further developed a method that is so similar to analytic geometry that his work is sometimes thought to have anticipated the work of Descartes by some 1800 years. His application of reference lines, a diameter and a tangent, is essentially no different than our modern use of a coordinate frame, where the distances measured along the diameter from the point of tangency are the abscissas, and the segments parallel to the tangent and intercepted between the axis and the curve are the ordinates. He further developed relations between the abscissas and the corresponding ordinates that are equivalent to rhetorical equations of curves. However, although Apollonius came close to developing analytic geometry, he did not manage to do so since he did not take into account negative magnitudes and in every case the coordinate system was superimposed upon a given curve a posteriori instead of a priori. That is, equations were determined by curves, but curves were not determined by equations. Coordinates, variables, and equations were subsidiary notions applied to a specific geometric situation.[1]
In the late 17th century, Edward Bernard discovered a version of De Rationis Sectione in the Bodleian Library. Although he began a translation, it was Halley who finished it and included it in a 1706 volume with his restoration of De Spatii Sectione.
The elliptic pencil of circles passing through the two points C and D (the set of red circles, in the figure) has the line CD as its radical axis. The centers of the circles in this pencil lie on the perpendicular bisector of CD. The hyperbolic pencil defined by points C and D (the blue circles) has its radical axis on the perpendicular bisector of line CD, and all its circle centers on line CD.
The radical axis of any pencil of circles, interpreted as an infinite-radius circle, belongs to the pencil. Any three circles belong to a common pencil whenever all three pairs share the same radical axis and their centers are collinear.
It is relatively easy to show using inversion that, in the Apollonian circles, every blue circle intersects every red circle orthogonally, i.e., at a right angle. Inversion of the blue Apollonian circles with respect to a circle centered on point C results in a pencil of concentric circles centered at the image of point D. The same inversion transforms the red circles into a set of straight lines that all contain the image of D. Thus, this inversion transforms the bipolar coordinate system defined by the Apollonian circles into a polar coordinate system. Obviously, the transformed pencils meet at right angles. Since inversion is a conformal transformation, it preserves the angles between the curves it transforms, so the original Apollonian circles also meet at right angles.
Alternatively,[4] the orthogonal property of the two pencils follows from the defining property of the radical axis, that from any point X on the radical axis of a pencil P the lengths of the tangents from X to each circle in P are all equal. It follows from this that the circle centered at X with length equal to these tangents crosses all circles of P perpendicularly. The same construction can be applied for each X on the radical axis of P, forming another pencil of circles perpendicular to P.
More generally, for every pencil of circles there exists a unique pencil consisting of the circles that are perpendicular to the first pencil. If one pencil is elliptic, its perpendicular pencil is hyperbolic, and vice versa; in this case the two pencils form a set of Apollonian circles. The pencil of circles perpendicular to a parabolic pencil is also parabolic; it consists of the circles that have the same common tangent point but with a perpendicular tangent line at that point.[5]

Figure 1. Apollonius' definition of a circle.
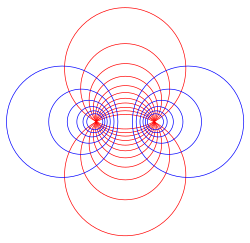
Figure 2: A set of Apollonian circles. Every blue circle intersects
every red circle at a right angle, and vice versa. Every red circle
passes through the two foci, which correspond to points A and B in Figure 1.

Figure 3:Apollonius' problem may have up to eight solutions. The three given circles are shown in black, whereas the solution circles are colored.
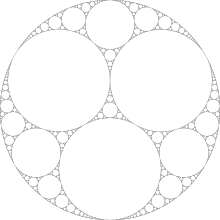
Figure 4: A symmetrical Apollonian gasket, also called the Leibniz packing, after its inventor Gottfried Leibniz.
By solving Apollonius' problem repeatedly to find the inscribed circle, the interstices between mutually tangential circles can be filled arbitrarily finely, forming an Apollonian gasket, also known as a Leibniz packing or an Apollonian packing.[1] This gasket is a fractal, being self-similar and having a dimension d that is not known exactly but is roughly 1.3,[2] which is higher than that of a regular (or rectifiable) curve (d=1) but less than that of a plane (d=2). The Apollonian gasket was first described by Gottfried Leibniz in the 17th century, and is a curved precursor of the 20th-century Sierpiński triangle.[3] The Apollonian gasket also has deep connections to other fields of mathematics; for example, it is the limit set of Kleinian groups.[4]
 defined by an arbitrary triangle
defined by an arbitrary triangle  . The circle
. The circle  is defined as the unique circle passing through the triangle vertex
is defined as the unique circle passing through the triangle vertex  that maintains a constant ratio of distances to the other two vertices
that maintains a constant ratio of distances to the other two vertices  and
and  (cf. Apollonius' definition of the circle above). Similarly, the circle
(cf. Apollonius' definition of the circle above). Similarly, the circle  is defined as the unique circle passing through the triangle vertex that maintains a constant ratio of distances to the other two vertices and , and so on for the circle
is defined as the unique circle passing through the triangle vertex that maintains a constant ratio of distances to the other two vertices and , and so on for the circle  .
.
All three circles intersect the circumcircle of the triangle orthogonally. All three circles pass through two points, denoted as the isodynamic points and
and  of the triangle. The line connecting these common intersection points is the radical axis for all three circles. The two isodynamic points are inverses of each other relative to the circumcircle of the triangle.
of the triangle. The line connecting these common intersection points is the radical axis for all three circles. The two isodynamic points are inverses of each other relative to the circumcircle of the triangle.
The centers of these three circles fall on a single line (the Lemoine line). This line is perpendicular to the radical axis defined by the isodynamic points and .
René Descartes discussed the problem briefly in 1643, in a letter to Princess Elisabeth of the Palatinate. He came up with essentially the same solution as given in equation (1) below, and thus attached his name to the theorem.
Frederick Soddy rediscovered the equation in 1936. The kissing circles in this problem are sometimes known as Soddy circles, perhaps because Soddy chose to publish his version of the theorem in the form of a poem titled The Kiss Precise, which was printed in Nature (June 20, 1936). Soddy also extended the theorem to spheres; Thorold Gosset extended the theorem to arbitrary dimensions.

Kissing circles. Given three mutually tangent circles (black), what radius can a fourth tangent circle have? There are in general two possible answers (red).
Descartes' theorem is most easily stated in terms of the circles' curvatures. The curvature (or bend) of a circle is defined as k = ±1/r, where r is its radius. The larger a circle, the smaller is the magnitude of its curvature, and vice versa.
The plus sign in k = ±1/r applies to a circle that is externally tangent to the other circles, like the three black circles in the image. For an internally tangent circle like the big red circle, that circumscribes the other circles, the minus sign applies.
If a straight line is considered a degenerate circle with zero curvature (and thus infinite radius), Descartes' theorem also applies to a line and two circles that are all three mutually tangent, giving the radius of a third circle tangent to the other two circles and the line.
If four circles are tangent to each other at six distinct points, and the circles have curvatures ki (for i = 1, ..., 4), Descartes' theorem says:
Other criteria may favor one solution over the other in any given problem.


Here, as all three circles are tangent to each other at the same point, Descartes' theorem does not apply.
If one of the three circles is replaced by a straight line, then one ki, say k3, is zero and drops out of equation (1). Equation (2) then becomes much simpler:
Another special case is when the ki are squares,
Given four circles with curvatures ki and centers zi (for i = 1...4), the following equality holds in addition to equation (1):
Although there is no 3-dimensional analogue of the complex numbers, the relationship between the positions of the centers can be re-expressed as a matrix equation, which also generalizes to n dimensions.[2]
The property of tangency is defined as follows. First, a point, line or circle is assumed to be tangent to itself; hence, if a given circle is already tangent to the other two given objects, it is counted as a solution to Apollonius' problem. Two distinct geometrical objects are said to intersect if they have a point in common. By definition, a point is tangent to a circle or a line if it intersects them, that is, if it lies on them; thus, two distinct points cannot be tangent. If the angle between lines or circles at an intersection point is zero, they are said to be tangent; the intersection point is called a tangent point or a point of tangency. (The word "tangent" derives from the Latin present participle, tangens, meaning "touching".) In practice, two distinct circles are tangent if they intersect at only one point; if they intersect at zero or two points, they are not tangent. The same holds true for a line and a circle. Two distinct lines cannot be tangent in the plane, although two parallel lines can be considered as tangent at a point at infinity in inversive geometry (see below).[5][6]
The solution circle may be either internally or externally tangent to each of the given circles. An external tangency is one where the two circles bend away from each other at their point of contact; they lie on opposite sides of the tangent line at that point, and they exclude one another. The distance between their centers equals the sum of their radii. By contrast, an internal tangency is one in which the two circles curve in the same way at their point of contact; the two circles lie on the same side of the tangent line, and one circle encloses the other. In this case, the distance between their centers equals the difference of their radii. As an illustration, in Figure 1, the pink solution circle is internally tangent to the medium-sized given black circle on the right, whereas it is externally tangent to the smallest and largest given circles on the left.
Apollonius' problem can also be formulated as the problem of locating one or more points such that the differences of its distances to three given points equal three known values. Consider a solution circle of radius rs and three given circles of radii r1, r2 and r3. If the solution circle is externally tangent to all three given circles, the distances between the center of the solution circle and the centers of the given circles equal d1 = r1 + rs, d2 = r2 + rs and d3 = r3 + rs, respectively. Therefore, differences in these distances are constants, such as d1 − d2 = r1 − r2; they depend only on the known radii of the given circles and not on the radius rs of the solution circle, which cancels out. This second formulation of Apollonius' problem can be generalized to internally tangent solution circles (for which the center-center distance equals the difference of radii), by changing the corresponding differences of distances to sums of distances, so that the solution-circle radius rs again cancels out. The re-formulation in terms of center-center distances is useful in the solutions below of Adriaan van Roomen and Isaac Newton, and also in hyperbolic positioning or trilateration, which is the task of locating a position from differences in distances to three known points. For example, navigation systems such as LORAN identify a receiver's position from the differences in arrival times of signals from three fixed positions, which correspond to the differences in distances to those transmitters.[7][8]
Although successful in solving Apollonius' problem, van Roomen's method has a drawback. A prized property in classical Euclidean geometry is the ability to solve problems using only a compass and a straightedge.[18] Many constructions are impossible using only these tools, such as dividing an angle in three equal parts. However, many such "impossible" problems can be solved by intersecting curves such as hyperbolas, ellipses and parabolas (conic sections). For example, doubling the cube (the problem of constructing a cube of twice the volume of a given cube) cannot be done using only a straightedge and compass, but Menaechmus showed that the problem can be solved by using the intersections of two parabolas.[19] Therefore, van Roomen's solution—which uses the intersection of two hyperbolas—did not determine if the problem satisfied the straightedge-and-compass property.
Van Roomen's friend François Viète, who had urged van Roomen to work on Apollonius' problem in the first place, developed a method that used only compass and straightedge.[20] Prior to Viète's solution, Regiomontanus doubted whether Apollonius' problem could be solved by straightedge and compass.[21] Viète first solved some simple special cases of Apollonius' problem, such as finding a circle that passes through three given points which has only one solution if the points are distinct; he then built up to solving more complicated special cases, in some cases by shrinking or swelling the given circles.[1] According to the 4th-century report of Pappus of Alexandria, Apollonius' own book on this problem—entitled Ἐπαφαί (Epaphaí, "Tangencies"; Latin: De tactionibus, De contactibus)—followed a similar progressive approach.[11] Hence, Viète's solution is considered to be a plausible reconstruction of Apollonius' solution, although other reconstructions have been published independently by three different authors.[22]
Several other geometrical solutions to Apollonius' problem were developed in the 19th century. The most notable solutions are those of Jean-Victor Poncelet (1811)[23] and of Joseph Diaz Gergonne (1814).[24] Whereas Poncelet's proof relies on homothetic centers of circles and the power of a point theorem, Gergonne's method exploits the conjugate relation between lines and their poles in a circle. Methods using circle inversion were pioneered by Julius Petersen in 1879;[25] one example is the annular solution method of HSM Coxeter.[2] Another approach uses Lie sphere geometry,[26] which was developed by Sophus Lie.
Algebraic solutions to Apollonius' problem were pioneered in the 17th century by René Descartes and Princess Elisabeth of Bohemia, although their solutions were rather complex.[9] Practical algebraic methods were developed in the late 18th and 19th centuries by several mathematicians, including Leonhard Euler,[27] Nicolas Fuss,[9] Carl Friedrich Gauss,[28] Lazare Carnot,[29] and Augustin Louis Cauchy.[30]

Area of Green + Area of Blue = Area of Red
In geometry, Apollonius' theorem is a theorem relating the length of a median of a triangle
to the lengths of its side. It states that "the sum of the squares of
any two sides of any triangle equals twice the square on half the third
side, together with twice the square on the median bisecting the third
side"
Specifically, in any triangle ABC, if AD is a median, then
The theorem is named for Apollonius of Perga.

Proof of Apollonius' theorem
The theorem can be proved as a special case of Stewart's theorem, or can be proved using vectors (see parallelogram law). The following is an independent proof using the law of cosines.[1]
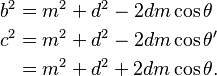
Let the triangle have sides a, b, c with a median d drawn to side a. Let m be the length of the segments of a formed by the median, so m is half of a. Let the angles formed between a and d be θ and θ′ where θ includes b and θ′ includes c. Then θ′ is the supplement of θ and cos θ′ = −cos θ. The law of cosines for θ and θ′ states
Apollonius was born in ca.262B.C., some 25years after Archimedes. He flourished in the reigns of ptolemy Euergetes and ptolemy philopator (247-205B.C). His treatise on conics earned him fame as "The Great Geometer", an achievement that has assured his fame for ever.
The degree of originality of the Conics can best be judged from Apollonius's own prefaces. Books i–iv he describes as an "elementary introduction" containing essential principles, while the other books are specialized investigations in particular directions. He then claims that, in Books i–iv, he only works out the generation of the curves and their fundamental properties presented in Book i more fully and generally than did earlier treatises, and that a number of theorems in Book iii and the greater part of Book iv are new. Allusions to predecessor's works, such as Euclid's four Books on Conics, show a debt not only to Euclid but also to Conon and Nicoteles.
In Book v, Apollonius treats normals as minimum and maximum straight lines drawn from given points to the curve (independently of tangent properties); discusses how many normals can be drawn from particular points; finds their feet[clarification needed] by construction; and gives propositions that both determine the center of curvature at any point and lead at once to the Cartesian equation of the evolute of any conic.
Apollonius in the Conics further developed a method that is so similar to analytic geometry that his work is sometimes thought to have anticipated the work of Descartes by some 1800 years. His application of reference lines, a diameter and a tangent, is essentially no different than our modern use of a coordinate frame, where the distances measured along the diameter from the point of tangency are the abscissas, and the segments parallel to the tangent and intercepted between the axis and the curve are the ordinates. He further developed relations between the abscissas and the corresponding ordinates that are equivalent to rhetorical equations of curves. However, although Apollonius came close to developing analytic geometry, he did not manage to do so since he did not take into account negative magnitudes and in every case the coordinate system was superimposed upon a given curve a posteriori instead of a priori. That is, equations were determined by curves, but curves were not determined by equations. Coordinates, variables, and equations were subsidiary notions applied to a specific geometric situation.[1]
Other works
Pappus mentions other treatises of Apollonius:- Λόγου ἀποτομή, De Rationis Sectione ("Cutting of a Ratio")
- Χωρίου ἀποτομή, De Spatii Sectione ("Cutting of an Area")
- Διωρισμένη τομή, De Sectione Determinata ("Determinate Section")
- Ἐπαφαί, De Tactionibus ("Tangencies")
- Νεύσεις, De Inclinationibus ("Inclinations")
- Τόποι ἐπίπεδοι, De Locis Planis ("Plane Loci").
De Rationis Sectione
De Rationis Sectione sought to resolve a simple problem: Given two straight lines and a point in each, draw through a third given point a straight line cutting the two fixed lines such that the parts intercepted between the given points in them and the points of intersection with this third line may have a given ratio.De Spatii Sectione
De Spatii Sectione discussed a similar problem requiring the rectangle contained by the two intercepts to be equal to a given rectangle.In the late 17th century, Edward Bernard discovered a version of De Rationis Sectione in the Bodleian Library. Although he began a translation, it was Halley who finished it and included it in a 1706 volume with his restoration of De Spatii Sectione.
De Sectione Determinata
De Sectione Determinata deals with problems in a manner that may be called an analytic geometry of one dimension; with the question of finding points on a line that were in a ratio to the others.[2] The specific problems are: Given two, three or four points on a straight line, find another point on it such that its distances from the given points satisfy the condition that the square on one or the rectangle contained by two has a given ratio either (1) to the square on the remaining one or the rectangle contained by the remaining two or (2) to the rectangle contained by the remaining one and another given straight line. Several have tried to restore the text to discover Apollonius's solution, among them Snellius (Willebrord Snell, Leiden, 1698); Alexander Anderson of Aberdeen, in the supplement to his Apollonius Redivivus (Paris, 1612); and Robert Simson in his Opera quaedam reliqua (Glasgow, 1776), by far the best attempt.[3]De Tactionibus
- For more information, see Problem of Apollonius.
De Inclinationibus
The object of De Inclinationibus was to demonstrate how a straight line of a given length, tending towards a given point, could be inserted between two given (straight or circular) lines. Though Marin Getaldić and Hugo d'Omerique (Geometrical Analysis, Cadiz, 1698) attempted restorations, the best is by Samuel Horsley (1770).[3]De Locis Planis
De Locis Planis is a collection of propositions relating to loci that are either straight lines or circles. Since Pappus gives somewhat full particulars of its propositions, this text has also seen efforts to restore it, not only by P. Fermat (Oeuvres, i., 1891, pp. 3–51) and F. Schooten (Leiden, 1656) but also, most successfully of all, by R. Simson (Glasgow, 1749).[3]Additional works
Ancient writers refer to other works of Apollonius that are no longer extant:- Περὶ τοῦ πυρίου, On the Burning-Glass, a treatise probably exploring the focal properties of the parabola
- Περὶ τοῦ κοχλίου, On the Cylindrical Helix (mentioned by Proclus)
- A comparison of the dodecahedron and the icosahedron inscribed in the same sphere
- Ἡ καθόλου πραγματεία, a work on the general principles of mathematics that perhaps included Apollonius's criticisms and suggestions for the improvement of Euclid's Elements
- Ὠκυτόκιον ("Quick Bringing-to-birth"), in which, according to Eutocius, Apollonius demonstrated how to find closer limits for the value of π (pi) than those of Archimedes, who calculated 3+1/7 as the upper limit (3.1428571, with the digits after the decimal point repeating) and 3+10/71 as the lower limit (3.1408456338028160, with the digits after the decimal point repeating)
- an arithmetical work (see Pappus) on a system both for expressing large numbers in language more everyday than that of Archimedes' The Sand Reckoner and for multiplying these large numbers
- a great extension of the theory of irrationals expounded in Euclid, Book x., from binomial to multinomial and from ordered to unordered irrationals (see extracts from Pappus' comm. on Eucl. x., preserved in Arabic and published by Woepcke, 1856).
Published editions
The best editions of the works of Apollonius are the following:- Apollonii Pergaei Conicorum libri quatuor, ex versione Frederici Commandini (Bononiae, 1566), fol.
- Apollonii Pergaei Conicorum libri octo, et Sereni Antissensis de Sectione Cylindri et Coni libri duo (Oxoniae, 1710), fol. (this is the monumental edition of Edmund Halley)
- the edition of the first four books of the Conics given in 1675 by Isaac Barrow
- Apollonii Pergaei de Sectione, Rationis libri duo: Accedunt ejusdem de Sectione Spatii libri duo Restituti: Praemittitur, &c., Opera et Studio Edmundi Halley (Oxoniae, 1706), 4to
- a German translation of the Conics by H. Balsam (Berlin, 1861)
- The definitive Greek text is the edition of Heiberg (Apollonii Pergaei quae Graece exstant Opera, Leipzig, 1891–1893)
- T. L. Heath, Apollonius, Treatise on Conic Sections (Cambridge, 1896)
- The Arabic translation of the Books V–VII was first published in two volumes by Springer Verlag in 1990 (ISBN 0-387-97216-1), volume 9 in the "Sources in the history of mathematics and physical sciences" series. The edition was produced by G. J. Toomer and provided with an English translation and various commentaries.
- Conics: Books I–III translated by R. Catesby Taliaferro, published by Green Lion Press (ISBN 1-888009-05-5). (An English translation of Book IV by Michael N. Fried is also available from the same publisher. ISBN 1-888009-20-9)
- Apollonius de Perge, Coniques: Texte grec et arabe etabli, traduit et commenté (De Gruyter, 2008–2010), eds. R. Rashed, M. Decorps-Foulquier, M. Federspiel. (This is a new edition of the surviving Greek text (Books I–IV), a full edition of the surviving Arabic text (Books I–VII) with French translation and commentaries.)
- Apollonius of Perga's Conica: Text, Context, Subtext. By Michael N. Fried and Sabetai Unguru (Brill).
- Edmund Halley's Reconstruction of the Lost Book of Apollonius' Conics. By Michael N. Fried (ISBN 1461401453
Apollonian circles
From Wikipedia, the free encyclopediaThis article is about a family of circles sharing a radical axis, and the corresponding family of orthogonal circles. For other circles associated with Apollonius of Perga, see circles of Apollonius.Apollonian circles are two families of circles such that every circle in the first family intersects every circle in the second family orthogonally, and vice versa. These circles form the basis for bipolar coordinates. They were discovered by Apollonius of Perga, a renowned Greek geometer.
Some Apollonian circles. Every blue circle intersects every red circle at a right angle. Every red circle passes through the two points, C and D, and every blue circle separates the two points.
Contents
Definition
The Apollonian circles are defined in two different ways by a line segment denoted CD.
Each circle in the first family (the blue circles in the figure) is associated with a positive real number r, and is defined as the locus of points X such that the ratio of distances from X to C and to D equals r,
Each circle in the second family (the red circles in the figure) is associated with an angle θ, and is defined as the locus of points X such that the inscribed angle CXD equals θ,
The two points where all the red circles cross are the limiting points of pairs of circles in the blue family.
Bipolar coordinates
A given blue circle and a given red circle intersect in two points. In order to obtain bipolar coordinates, a method is required to specify which point is the right one. An isoptic arc is the locus of points X that sees points C and D under a given oriented angle of vectors i.e.
 . When we really want the whole red circle, a description using oriented angles of straight lines has to be used
. When we really want the whole red circle, a description using oriented angles of straight lines has to be used
Pencils of circles
Both of the families of Apollonian circles are called pencils of circles. More generally, there is a natural correspondence between circles in the plane and points in three-dimensional projective space; a line in this space corresponds to a one-dimensional continuous family of circles called a pencil.
Specifically, the equation of a circle of radius r centered at a point (p,q),
The set of affine combinations of two circles (α1,β1,γ1,δ1), (α2,β2,γ2,δ2), that is, the set of circles represented by the four-tuple
- An elliptic pencil (red family of circles in the figure) is defined by two generators that pass through each other in exactly two points (C and D). At these points, the defining formula has zero value, and therefore will also equal zero for any affine combination. Thus, every circle of an elliptic pencil passes through the same two points. An elliptic pencil does not include any imaginary circles.
- A hyperbolic pencil (blue family of circles in the figure) is defined by two generators that do not intersect each other at any point. It includes real circles, imaginary circles, and two degenerate point circles (here C and D) called the Poncelet points of the pencil. Each point in the plane belongs to exactly one circle of the pencil. forms a pencil of this type.
- Finally, a parabolic pencil (as a limiting case) is defined where two generating circles are tangent to each other at a single point . It consists of a family of real circles, all tangent to each other at a single common point. The degenerate circle with radius zero at that point also belongs to the pencil.







Radical axis and central line
Except for the two special cases of a pencil of concentric circles and a pencil of coincident lines, any two circles within a pencil have the same radical axis, and all circles in the pencil have collinear centers. Any three or more circles from the same family are called coaxal circles or coaxial circles.[3]The elliptic pencil of circles passing through the two points C and D (the set of red circles, in the figure) has the line CD as its radical axis. The centers of the circles in this pencil lie on the perpendicular bisector of CD. The hyperbolic pencil defined by points C and D (the blue circles) has its radical axis on the perpendicular bisector of line CD, and all its circle centers on line CD.
The radical axis of any pencil of circles, interpreted as an infinite-radius circle, belongs to the pencil. Any three circles belong to a common pencil whenever all three pairs share the same radical axis and their centers are collinear.
Inversive geometry, orthogonal intersection, and coordinate systems
Circle inversion transforms the plane in a way that maps circles into circles, and pencils of circles into pencils of circles. The type of the pencil is preserved: the inversion of an elliptic pencil is another elliptic pencil, the inversion of a hyperbolic pencil is another hyperbolic pencil, and the inversion of a parabolic pencil is another parabolic pencil.It is relatively easy to show using inversion that, in the Apollonian circles, every blue circle intersects every red circle orthogonally, i.e., at a right angle. Inversion of the blue Apollonian circles with respect to a circle centered on point C results in a pencil of concentric circles centered at the image of point D. The same inversion transforms the red circles into a set of straight lines that all contain the image of D. Thus, this inversion transforms the bipolar coordinate system defined by the Apollonian circles into a polar coordinate system. Obviously, the transformed pencils meet at right angles. Since inversion is a conformal transformation, it preserves the angles between the curves it transforms, so the original Apollonian circles also meet at right angles.
Alternatively,[4] the orthogonal property of the two pencils follows from the defining property of the radical axis, that from any point X on the radical axis of a pencil P the lengths of the tangents from X to each circle in P are all equal. It follows from this that the circle centered at X with length equal to these tangents crosses all circles of P perpendicularly. The same construction can be applied for each X on the radical axis of P, forming another pencil of circles perpendicular to P.
More generally, for every pencil of circles there exists a unique pencil consisting of the circles that are perpendicular to the first pencil. If one pencil is elliptic, its perpendicular pencil is hyperbolic, and vice versa; in this case the two pencils form a set of Apollonian circles. The pencil of circles perpendicular to a parabolic pencil is also parabolic; it consists of the circles that have the same common tangent point but with a perpendicular tangent line at that point.[5]
Notes
- Pfeifer & Van Hook (1993).
- Schwerdtfeger (1979, pp. 8–10).
- MathWorld uses “coaxal,” while Akopyan & Zaslavsky (2007) prefer “coaxial.”
- Akopyan & Zaslavsky (2007), p. 59.
- Schwerdtfeger (1979, pp. 30–31, Theorem A).
References
- Akopyan, A. V.; Zaslavsky, A. A. (2007), Geometry of Conics, Mathematical World 26, American Mathematical Society, pp. 57–62, ISBN 978-0-8218-4323-9.
- Pfeifer, Richard E.; Van Hook, Cathleen (1993), "Circles, Vectors, and Linear Algebra", Mathematics Magazine 66 (2): 75–86, doi:10.2307/2691113, JSTOR 2691113.
- Schwerdtfeger, Hans (1979), Geometry of Complex Numbers: Circle Geometry, Moebius Transformation, Non-Euclidean Geometry, Dover, pp. 8–10.
- Samuel, Pierre (1988), Projective Geometry, Springer, pp. 40–43.
- Ogilvy, C. Stanley (1990), Excursions in Geometry, Dover, ISBN 0-486-26530-7
Circles of Apollonius
From Wikipedia, the free encyclopedia"Apollonian circle" redirects here. For a subdivision of this subject, see Apollonian circles.The circle of Apollonius is any of several types of circles associated with Apollonius of Perga, a renowned Greek geometer. Most of these circles are found in planar Euclidean geometry, but analogs have been defined on other surfaces; for example, counterparts on the surface of a sphere can be defined through stereographic projection.
The main uses of this term are fivefold:
- Apollonius showed that a circle can be defined as the set of points in a plane that have a specified ratio of distances to two fixed points known as foci. This circle of Apollonius is the basis of the Apollonius pursuit problem.
- The Apollonian circles are two families of mutually orthogonal circles. The first family consists of the circles with all possible distance ratios to two fixed foci, whereas the second family consists of all possible circles that pass through both foci. These circles form the basis of bipolar coordinates.
- Apollonius' problem is to construct circles that are simultaneously tangent to three specified circles. The solutions to this problem are sometimes called the "circles of Apollonius".
- The Apollonian gasket—one of the first fractals ever described—is a set of mutually tangent circles, formed by solving Apollonius' problem iteratively.
- The isodynamic points and Lemoine line of a triangle can be solved using three circles, each of which passes through one vertex of the triangle and maintains a constant ratio of distances to the other two.
Contents
Apollonius' definition of a circle

Main article: Apollonian circles
A circle is usually defined as the set of points P at a given distance r
(the circle's radius) from a given point (the circle's center).
However, there are other, equivalent definitions of a circle. Apollonius
discovered that a circle could also be defined as the set of points P that have a given ratio of distances k = d1/d2 to two given points (labeled A and B in Figure 1). These two points are sometimes called the foci.Apollonius pursuit problem
The Apollonius pursuit problem is one of finding where a ship leaving from one point A at speed v1 will intercept another ship leaving a different point B at speed v2. By assumption, the ships travel in straight lines and the ratio of their speeds is denoted as k = v1/v2. At the point they meet, the first ship will have traveled a k-fold longer distance than the second ship. Therefore, the point must lie on a circle as defined by Apollonius, with their starting points as the foci.
Circles sharing a radical axis
Main article: Apollonian circles
The circles defined by the Apollonian pursuit problem for the same two points A and B,
but with varying ratios of the two speeds, are disjoint from each other
and form a continuous family that cover the entire plane; this family
of circles is known as a hyperbolic pencil. Another family of circles, the circles that pass through both A and B, are also called a pencil, or more specifically an elliptic pencil. These two pencils of Apollonian circles intersect each other at right angles and form the basis of the bipolar coordinate system. Within each pencil, any two circles have the same radical axis;
the two radical axes of the two pencils are perpendicular, and the
centers of the circles from one pencil lie on the radical axis of the
other pencil.Solutions to Apollonius' problem

Main article: Problem of Apollonius
Apollonian gasket
Main article: Apollonian gasket

Isodynamic points of a triangle
Circles of Apollonius may be used as a technical term to denote three special circles defined by an arbitrary triangle . The circle is defined as the unique circle passing through the triangle vertex that maintains a constant ratio of distances to the other two vertices and (cf. Apollonius' definition of the circle above). Similarly, the circle is defined as the unique circle passing through the triangle vertex that maintains a constant ratio of distances to the other two vertices and , and so on for the circle .All three circles intersect the circumcircle of the triangle orthogonally. All three circles pass through two points, denoted as the isodynamic points
and of the triangle. The line connecting these common intersection points is the radical axis for all three circles. The two isodynamic points are inverses of each other relative to the circumcircle of the triangle.The centers of these three circles fall on a single line (the Lemoine line). This line is perpendicular to the radical axis defined by the isodynamic points
and .Descartes' theorem
From Wikipedia, the free encyclopedia
For other uses, see Descartes' theorem (disambiguation).
In geometry, Descartes' theorem states that for every four kissing, or mutually tangent, circles, the radii of the circles satisfy a certain quadratic equation.
By solving this equation, one can construct a fourth circle tangent to
three given, mutually tangent circles. The theorem is named after René Descartes, who stated it in 1643.Contents
History
Geometrical problems involving tangent circles have been pondered for millennia. In ancient Greece of the third century BC, Apollonius of Perga devoted an entire book to the topic. Unfortunately the book, which was called On Tangencies, is not among his surviving works.René Descartes discussed the problem briefly in 1643, in a letter to Princess Elisabeth of the Palatinate. He came up with essentially the same solution as given in equation (1) below, and thus attached his name to the theorem.
Frederick Soddy rediscovered the equation in 1936. The kissing circles in this problem are sometimes known as Soddy circles, perhaps because Soddy chose to publish his version of the theorem in the form of a poem titled The Kiss Precise, which was printed in Nature (June 20, 1936). Soddy also extended the theorem to spheres; Thorold Gosset extended the theorem to arbitrary dimensions.
Definition of curvature

The plus sign in k = ±1/r applies to a circle that is externally tangent to the other circles, like the three black circles in the image. For an internally tangent circle like the big red circle, that circumscribes the other circles, the minus sign applies.
If a straight line is considered a degenerate circle with zero curvature (and thus infinite radius), Descartes' theorem also applies to a line and two circles that are all three mutually tangent, giving the radius of a third circle tangent to the other two circles and the line.
If four circles are tangent to each other at six distinct points, and the circles have curvatures ki (for i = 1, ..., 4), Descartes' theorem says:
 ()
()
 ()
()
Other criteria may favor one solution over the other in any given problem.
Special cases

One of the circles is replaced by a straight line of zero curvature. Descartes' theorem still applies.

 ()
()

Another special case is when the ki are squares,





![[v, x, y, z] =\, [2(ab-cd)(ab+cd), (a^2+b^2+c^2+d^2)(a^2-b^2+c^2-d^2), 2(ac-bd)(a^2+c^2), 2(ac-bd)(b^2+d^2)]](http://upload.wikimedia.org/math/3/8/4/3849928e47ad9da1d3c3159f54ee84cc.png)

Complex Descartes theorem
To determine a circle completely, not only its radius (or curvature), but also its center must be known. The relevant equation is expressed most clearly if the coordinates (x, y) are interpreted as a complex number z = x + iy. The equation then looks similar to Descartes' theorem and is therefore called the complex Descartes theorem.Given four circles with curvatures ki and centers zi (for i = 1...4), the following equality holds in addition to equation (1):
 ()
()

Generalizations
The generalization to n dimensions is sometimes referred to as the Soddy–Gosset theorem, even though it was shown by R. Lachlan in 1886. In n-dimensional Euclidean space, the maximum number of mutually tangent (n − 1)-spheres is n + 2. For example, in 3-dimensional space, five spheres can be mutually tangent.The curvatures of the hyperspheres satisfy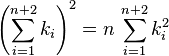
Although there is no 3-dimensional analogue of the complex numbers, the relationship between the positions of the centers can be re-expressed as a matrix equation, which also generalizes to n dimensions.[2]
Statement of the problem
The general statement of Apollonius' problem is to construct one or more circles that are tangent to three given objects in a plane, where an object may be a line, a point or a circle of any size.[1][2][3][4] These objects may be arranged in any way and may cross one another; however, they are usually taken to be distinct, meaning that they do not coincide. Solutions to Apollonius' problem are sometimes called Apollonius circles, although the term is also used for other types of circles associated with Apollonius.The property of tangency is defined as follows. First, a point, line or circle is assumed to be tangent to itself; hence, if a given circle is already tangent to the other two given objects, it is counted as a solution to Apollonius' problem. Two distinct geometrical objects are said to intersect if they have a point in common. By definition, a point is tangent to a circle or a line if it intersects them, that is, if it lies on them; thus, two distinct points cannot be tangent. If the angle between lines or circles at an intersection point is zero, they are said to be tangent; the intersection point is called a tangent point or a point of tangency. (The word "tangent" derives from the Latin present participle, tangens, meaning "touching".) In practice, two distinct circles are tangent if they intersect at only one point; if they intersect at zero or two points, they are not tangent. The same holds true for a line and a circle. Two distinct lines cannot be tangent in the plane, although two parallel lines can be considered as tangent at a point at infinity in inversive geometry (see below).[5][6]
The solution circle may be either internally or externally tangent to each of the given circles. An external tangency is one where the two circles bend away from each other at their point of contact; they lie on opposite sides of the tangent line at that point, and they exclude one another. The distance between their centers equals the sum of their radii. By contrast, an internal tangency is one in which the two circles curve in the same way at their point of contact; the two circles lie on the same side of the tangent line, and one circle encloses the other. In this case, the distance between their centers equals the difference of their radii. As an illustration, in Figure 1, the pink solution circle is internally tangent to the medium-sized given black circle on the right, whereas it is externally tangent to the smallest and largest given circles on the left.
Apollonius' problem can also be formulated as the problem of locating one or more points such that the differences of its distances to three given points equal three known values. Consider a solution circle of radius rs and three given circles of radii r1, r2 and r3. If the solution circle is externally tangent to all three given circles, the distances between the center of the solution circle and the centers of the given circles equal d1 = r1 + rs, d2 = r2 + rs and d3 = r3 + rs, respectively. Therefore, differences in these distances are constants, such as d1 − d2 = r1 − r2; they depend only on the known radii of the given circles and not on the radius rs of the solution circle, which cancels out. This second formulation of Apollonius' problem can be generalized to internally tangent solution circles (for which the center-center distance equals the difference of radii), by changing the corresponding differences of distances to sums of distances, so that the solution-circle radius rs again cancels out. The re-formulation in terms of center-center distances is useful in the solutions below of Adriaan van Roomen and Isaac Newton, and also in hyperbolic positioning or trilateration, which is the task of locating a position from differences in distances to three known points. For example, navigation systems such as LORAN identify a receiver's position from the differences in arrival times of signals from three fixed positions, which correspond to the differences in distances to those transmitters.[7][8]
History
A rich repertoire of geometrical and algebraic methods have been developed to solve Apollonius' problem,[9][10] which has been called "the most famous of all" geometry problems.[3] The original approach of Apollonius of Perga has been lost, but reconstructions have been offered by François Viète and others, based on the clues in the description by Pappus.[11][12] The first new solution method was published in 1596 by Adriaan van Roomen, who identified the centers of the solution circles as the intersection points of two hyperbolas.[13][14] Van Roomen's method was refined in 1687 by Isaac Newton in his Principia,[15][16] and by John Casey in 1881.[17]Although successful in solving Apollonius' problem, van Roomen's method has a drawback. A prized property in classical Euclidean geometry is the ability to solve problems using only a compass and a straightedge.[18] Many constructions are impossible using only these tools, such as dividing an angle in three equal parts. However, many such "impossible" problems can be solved by intersecting curves such as hyperbolas, ellipses and parabolas (conic sections). For example, doubling the cube (the problem of constructing a cube of twice the volume of a given cube) cannot be done using only a straightedge and compass, but Menaechmus showed that the problem can be solved by using the intersections of two parabolas.[19] Therefore, van Roomen's solution—which uses the intersection of two hyperbolas—did not determine if the problem satisfied the straightedge-and-compass property.
Van Roomen's friend François Viète, who had urged van Roomen to work on Apollonius' problem in the first place, developed a method that used only compass and straightedge.[20] Prior to Viète's solution, Regiomontanus doubted whether Apollonius' problem could be solved by straightedge and compass.[21] Viète first solved some simple special cases of Apollonius' problem, such as finding a circle that passes through three given points which has only one solution if the points are distinct; he then built up to solving more complicated special cases, in some cases by shrinking or swelling the given circles.[1] According to the 4th-century report of Pappus of Alexandria, Apollonius' own book on this problem—entitled Ἐπαφαί (Epaphaí, "Tangencies"; Latin: De tactionibus, De contactibus)—followed a similar progressive approach.[11] Hence, Viète's solution is considered to be a plausible reconstruction of Apollonius' solution, although other reconstructions have been published independently by three different authors.[22]
Several other geometrical solutions to Apollonius' problem were developed in the 19th century. The most notable solutions are those of Jean-Victor Poncelet (1811)[23] and of Joseph Diaz Gergonne (1814).[24] Whereas Poncelet's proof relies on homothetic centers of circles and the power of a point theorem, Gergonne's method exploits the conjugate relation between lines and their poles in a circle. Methods using circle inversion were pioneered by Julius Petersen in 1879;[25] one example is the annular solution method of HSM Coxeter.[2] Another approach uses Lie sphere geometry,[26] which was developed by Sophus Lie.
Algebraic solutions to Apollonius' problem were pioneered in the 17th century by René Descartes and Princess Elisabeth of Bohemia, although their solutions were rather complex.[9] Practical algebraic methods were developed in the late 18th and 19th centuries by several mathematicians, including Leonhard Euler,[27] Nicolas Fuss,[9] Carl Friedrich Gauss,[28] Lazare Carnot,[29] and Augustin Louis Cauchy.[30]
Apollonius' theorem
From Wikipedia, the free encyclopedia

Specifically, in any triangle ABC, if AD is a median, then

The theorem is named for Apollonius of Perga.
Proof

Let the triangle have sides a, b, c with a median d drawn to side a. Let m be the length of the segments of a formed by the median, so m is half of a. Let the angles formed between a and d be θ and θ′ where θ includes b and θ′ includes c. Then θ′ is the supplement of θ and cos θ′ = −cos θ. The law of cosines for θ and θ′ states



{kind=link}
No comments:
Post a Comment